Kismet is an autonomous robot designed for social interactions with
humans and is part of the larger
An infant's emotions and drives play an important role in generating
meaningful interactions with the caretaker. These interactions
constitute learning episodes for new communication behaviors. In
particular, the infant is strongly biased to learn communication
skills that result in having the caretaker satisfy the infant's
drives. The infant's emotional responses provide important cues which
the caretaker uses to assess how to satiate the infant's drives, and
how to carefully regulate the complexity of the interaction. The
former is critical for the infant to learn how its actions influence
the caretaker, and the later is critical for establishing and
maintaining a suitable learning environment for the infant.
An infant's motivations are vital to regulating social interactions
with his mother. Soon after birth, an infant is able to display a
wide variety of facial expressions, and responds to events in the
world with expressive cues that his mother can read, interpret, and
act upon. She interprets them as indicators of his internal state
(how he feels and why), and modifies her actions to promote his well
being. For example, when he appears content she tends to maintain the
current level of interaction, but when he appears disinterested she
intensifies or changes the interaction to try to re-engage him. In
this manner, the infant can regulate the intensity of interaction with
his mother by displaying appropriate emotive cues. The mother
instinctively reads her infant's expressive signals and modifies her
actions in an effort to maintain a level of interaction suitable for
him.
For Kismat, an important function for its motivational system is
not only to establish appropriate interactions with the caretaker, but
to also to regulate their intensity so that Kismet is neither
over-whelmed nor under-stimulated by them. When designed properly,
the intensity of Kismet's expressions provide appropriate cues for the
caretaker to increase the intensity of the interaction, tone it down,
or maintain it at the current level. By doing so, both parties can
modify their own behavior and the behavior of the other to maintain
the intensity of interaction that Kismet requires to behave
adeptly.
The use of emotional expressions and gestures facilitates and biases
learning during social exchanges. Parents take an active role in
shaping and guiding how and what infants learn by means of
scaffolding. As the word implies, the parent provides a supportive
framework for the infant by manipulating the infant's interactions
with the environment to foster novel abilities. Commonly, scaffolding
involves reducing distractions, marking the task's critical
attributes, reducing the number of degrees of freedom in the target
task, providing ongoing reinforcement through expressive displays of
face and voice, and enabling the subject to experience the end or
outcome of a sequence of activity before the infant is cognitively or
physically able of seeking and attaining it for himself.
The emotive cues the parent receives during
social exchanges serve as feedback so the parent can adjust the nature
and intensity of the structured learning episode to maintain a
suitable learning environment where the infant is neither bored nor
over-whelmed.
In addition, during early interactions with his mother, an infant's
motivations and emotional displays are critical in establishing the
foundational context for learning episodes from which he can learn
shared meanings of communicative acts. During early face-to-face
exchanges with his mother, an infant displays a wide assortment of
emotive cues such as coos, smiles, waves, and kicks. At such an early
age, the infant's basic needs, emotions, and emotive expressions are
among the few things his mother thinks they share in common.
Consequently, she imparts a consistent meaning to her infant's
expressive gestures and expressions, interpreting them as meaningful
responses to her mothering and as indications of his internal state.
Curiously, some experiments performed by developmental psychologists
argue that the mother actually supplies most if not all the
meaning to the exchange when the infant is so young. The infant does
not know the significance his expressive acts have for his mother, nor
how to use them to evoke specific responses from her. However,
because the mother assumes her infant shares the same meanings
for emotive acts, her consistency allows the infant to discover
what sorts of activities on his part will get specific responses from
her. Routine sequences of a predictable nature can be built up which
serve as the basis of learning episodes.
Furthermore, it provides a context of mutual expectations.
For example, early cries of an infant elicit various care-giving
responses from his mother depending upon how she initially interprets
these cries and how the infant responds to her mothering acts. Over
time, the infant and mother converge on specific meanings for
different kinds of cries. Gradually the infant uses subtly different
cries (i.e., cries of distress, cries for attention, cries of pain,
cries of fear) to elicit different responses from his mother. The
mother reinforces the shared meaning of the cries by responding in
consistent ways to the subtle variations. Evidence of this phenomena
exists where mother-infant pairs develop communication protocols
different from those of other mother-infant pairs.
An ongoing research goal is to implement these ideas so that Kismet
is biased to learn how its actions influence the caretaker in
order to satisfy its own drives. Toward this end, Kismet is endowed
with a motivational system that works to maintain its drives within
homeostatic bounds and motivates the robot to learn behaviors that
satiate them. Further, Kismet can display a set of emotive
expressions that are easily interpreted by a naive observer as
analogues of the types of emotive expressions that human infants
display. This allows the caretaker to observe Kismet's emotive
expressions and interpret them as communicative acts. She assumes the
robot is trying to tell her which of its needs must be tended to, and
she acts accordingly. This establishes the requisite routine
interactions for the robot to learn how its emotive acts influence the
behavior of the caretaker, which ultimately serves to satiate the
robot's own drives.
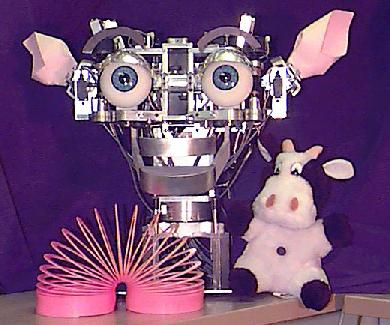
To explore these ideas, Kismet was adapted from an existing active
vision platform commonly used in the Cog Shop. The figure above shows
various stages of development of Kismet. The original head is shown
above at the far left (circa May 1997), and the current state of the
robot is shown at the far right (circa March 1998). The appearance and
degrees of freedom of the robot continues to evolve.
Similar to other active vision systems, there are three degrees of
freedom; each eye has an independent vertical axis of rotation (pan)
and the eyes share a joint horizontal axis of rotation (tilt). Each
eyeball has a color CCD camera embedded within it having a 5.6 mm
focal length. Although this limits the field of view, most social
interactions require a high acuity central area to capture the details
of face-to-face interaction. However, infants have poor visual acuity
which restricts their visual attention to about two feet away --
typically the distance to their mother's face when the infant is being
held (for example, at one month the infant has a visual acuity between
20/400 to 20/600). This choice of camera is a balance between the
need for high resolution and the need for a wide low-acuity field of
view.
Over time, the basic active vision platform has been embellished
with facial features so that Kismet is capable of a wide range of
emotive facial expressions (as shown in the figure above). Currently,
these facial features include eyebrows (each with two
degrees-of-freedom: lift and arch), ears (each with two
degrees-of-freedom: lift and rotate), eyelids (each with one degree of
freedom: open/close), and a mouth (with one degree of freedom:
open/close). The robot is able to show expressions analogous to
anger, fatigue, fear, disgust, excitement, happiness, interest,
sadness, and surprise (shown in the figure below) which are easily
interpreted by an untrained human observer.
Planned extensions to kismet's sensor and motor systems include
stereo microphones for auditory input as well as a synthesized
articulatory model for vocalized outputs.
Kismet's active vision platform is attached to a parallel network of
digital signal processors (Texas Instruments TMS320C40), as shown in
the figure above. The DSP network serves as the sensory
processing engine and implements the bulk of the robot's perception
and attention systems. Each node in the network contains one
processor with the option for more specialized hardware for capturing
images, performing convolution quickly, or displaying images to a VGA
display. Nodes may be connected with arbitrary bi-directional
hardware connections, and distant nodes may communicate through
virtual connections. Each camera is attached to its own frame
grabber, which can transmit captured images to connected nodes.
A pair of Motorola 68332-based microcontrollers are also connected
to Kismet. One controller implements the motor system for driving
the robot's facial motors. The second controller implements the
motivational system (emotions and drives) and the behavior
system. This node receives pre-processed perceptual information from
the DSP network through a dual-ported RAM, and converts this
information into a behavior-specific percept which is then fed into
the rest of the behavior engine.
A framework for Kismet's behavior engine is shown to the right. The
organization and operation of this framework is heavily influenced by
concepts from psychology, ethology, and developmental psychology, as
well as the applications of these fields to robotics as outlined in
"Alternative Essenceses of
Intelligence". The system architecture consists of five
subsystems: the perception system, the motivation system,
the attention system, the behavior system, and the
motor system, an elaborated version from that presented in previous
work, "A Motivational
System for Regulating Human-Robot Interaction". The perception system
extracts salient features from the world, the motivation system
maintains internal state in the form of ``drives'' and ``emotions'',
the attention system determines saliency based upon perception and
motivation, the behavior system implements various types of behaviors
as conceptualized by the theories of Tinbergen and Lorenz, and the
motor system realizes these behaviors as facial expressions and other
motor skills.
A series of experiments were performed with Kismet using a specific
implementation of the behavior engine framework.
The total system consists of three drives: fatigue,
social, and stimulation; three consummatory behaviors:
sleep, socialize, and play; two visually-based
percepts: ``face'' and ``non-face''; five emotions: anger,
disgust, fear, happiness, sadness; two expressive
states: tiredness and interest, and their corresponding facial
expressions.
A more detailed schematic for the ``social'' circuit is shown
below. The ``fatigue'' circuit and the ``stimulation'' circuit follow
a similar structure. See "Infant-like Social Interactions
Between a Robot and a Human Caretaker" for an in depth
presentation.
Each experiment involved a human interacting with Kismet either
through direct face-to-face interaction, by waving a hand at the
robot, or using a toy to play with the robot. Two toys were used:
a small plush black and white cow and
an orange plastic slinky. The perceptual system
classifies these interactions into two classes: ``face stimuli'' and
``non-face stimuli''. The face detection routine classifies both
the human face and the face of the plush cow as face stimuli, while
the waving hand and the slinky are classified as non-face stimuli.
Additionally, the motion generated by the object gives a rating of the
stimulus intensity. The robot's facial expressions reflect its
ongoing motivational state (i.e. it's mood) and provides the human
with visual cues as to how to modify the interaction to keep the
robot's drives within homeostatic ranges.
In general, as long as all the robot's drives remain within their
homeostatic ranges, the robot displays ``interest''. This cues the
human that the interaction is of appropriate intensity. If the human
engages the robot in face-to-face contact while its drives are within
their homeostatic regime, the robot displays ``happiness''. However,
once any drive leaves its homeostatic range, the robot's ``interest''
and/or ``happiness'' wane(s) as it grows increasingly distressed. As
this occurs, the robot's expression reflects its distressed state.
This visual cue tells the human that all is not well with the robot,
whether the human should switch the type of stimulus, and whether the
intensity of interaction should be intensified, diminished or
maintained at its current level.
For all of the experiments, data was recorded on-line in
real-time during interactions between a human and the robot. The data
plots below show the activation levels of the appropriate emotions,
drives, behaviors, and percepts. Emotions are always plotted together
with activation levels ranging from 0 to 2000. Percepts, behaviors,
and drives are often plotted together. Percepts and behaviors have
activation levels that also range from 0 to 2000, with higher values
indicating stronger stimuli or higher potentiation respectively.
Drives have activations ranging from -2000 (the over-whelmed extreme)
to 2000 (the under-whelmed extreme).
This plot shows how Kismet's internal state responds to varying
intensities of face-to-face contact. Before the run begins, the robot
is not shown any faces so that the social drive lies in the
lonely regime and the robot displays an expression of
``sadness''. At t=10 the experimenter makes face-to-face
contact with the robot. From 10 >= t >= 58 the face stimulus is
within the desired intensity range. This corresponds to small head
motions, much like those made when engaging a person in
conversation. As a result, the social drive moves to the
homeostatic regime, and a look of ``interest'' and ``happiness''
appear on the robot's face. From 60 >= t >= 90 the experimenter
begins to sway back and forth in front of the robot. This corresponds
to a face stimulus of over-whelming intensity, which forces the
social drive into the asocial regime. As the drive
intensifies toward a value of -1800, first a look of ``disgust''
appears on the robot's face, which grows in intensity and is
eventually blended with ``anger''. From 90 >= t >= 115 the
experimenter turns her face away so that it is not detected by the
robot. This allows the drive to recover back to the homeostatic
regime and a look of ``interest'' returns to the robot's face. From
115 >= t >= 135 the experimenter re-engages the robot in
face-to-face interaction of acceptable intensity and the robot, and
the robot responds with an expression of ``happiness''. From 135 >=
t >= 170 the experimenter turns away from the robot, which causes
the drive to return to the lonely regime and redisplay
``sadness''. For t >= 170 the experimenter re-engages the robot
in face-to-face contact, which leaves the robot in an ``interested''
and ``happy'' state at the conclusion of the run.
The results from the rest of the aforementioned experiments can be
found in "Infant-like Social
Interactions Between a Robot and a Human Caretaker". A sampling of
video clips from similar experiments is available in the next section.
All of the video clips are recorded at a resolution of 320 by 240.
The video clips are available in two formats (as Quicktime movies and
as MPEG's), and at two frame rates (30 frames per second and 15 frames
per second). We suggest that you start by viewing the 15 frames per
second clips, since they are smaller and quicker to download.
All video clips are Copyright, 1997, by the Cog Shop, MIT Artificial
Intelligence Laboratory, Massachusetts Institute of Technology. These
clips may not be distributed, published, or rebroadcast without prior
written consent.
Here is some 1998 footage showing Kismet engaged in social
interaction with Cynthia Breazeal(Ferrell). Kismet is attending to
the motion of her face or to the motion of other stimuli, and providing
emotive cues to regulate the intensity of interaction.
Support for this research was provided by a MURI grant under the
Office of Naval Research contract N00014--95--1--0600. Early designs
and implementations of the motivational system took place during a
visiting appointment at the Santa Fe Institute.
The Importance of Regulating Social Interactions
En Route to Learning in a Social Context
The Robotic Platform
![[Kismet: May 1997]](headSmall.jpg)
![[Kismet: Sept 1997]](SFI_interestBWsmall.jpg)
![[Kismet: Feb 1997]](NoMouthBWsmall.jpg)
![[Kismet: March 1998]](SurpriseKismetBWsmall.jpg)
![[Kismet's facial expressions]](collage-label.jpg)
Computational Hardware
![[Kismet's computational hardware]](hardware.jpg)
The Software System
![[Behavior engine architecture]](framework.jpg)
Early Experiments in Regulating Social Interaction
![[social drive circuit]](social-circuit.jpg)
Results from Regulating the Intensity of Face-to-Face
Interaction
![[face-to-face interaction experiments]](face-color.jpg)
Kismet video clips
Footage from a Variety of Social Interaction Experiments
Face-to-face Interaction
This clip shows
how Kismet responds when engaged in face-to-face contact with
Cynthia. Kismet becomes more asocial (as shown by a disgusted
expression) when Cynthia moves too much and over-stimulates Kismet.
However, Kismet responds positively to an appropriate
amount of stimulation.Interaction with a Slinky
This clip shows how Kismet responds to varying amounts of slinky
motion. Kismet becomes more distressed (shown by an expression of
fear) when Cynthia moves the slinky too vigorously, causing Kismet to be
over-stimulated. However, Kismet likes small slinky motions.Over-stimulation with a Stuffed Toy
This
clip shows how Kismet responds after being over-stimulated for an
extended period of time. Because Cynthia refuses to engage Kismet at a
suitable level of intensity and continues to wave the stuffed toy
vigorously in front of Kismet's face, Kismet must terminate the
interaction so it can restore itself to a state of homeostatic
balance. To do so, Kismet shuts its eyes and goes to sleep. As it
sleeps, all of its drives are restored to the balanced regieme. Once
this occurs, Kismet awakens and is ready to resume interaction.
Related Publications