Planar Biped (1985-1990)
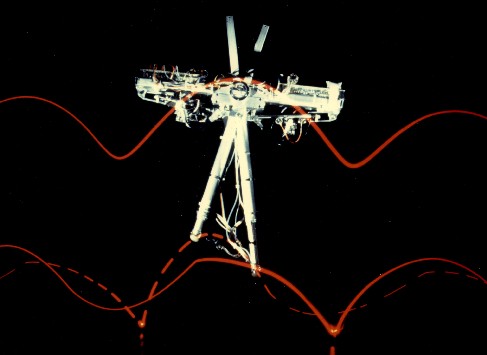
We built the Planar Biped, a planar two-legged running machine, to test the control of
bipedal running using the one-leg algorithms.
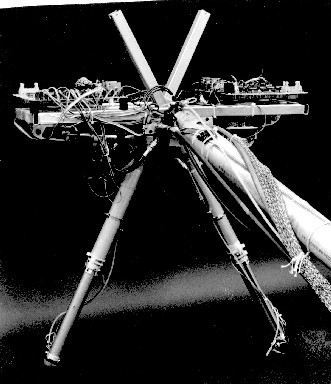
The machine has two telescoping legs connected to the body by pivot joints at the hips.
A hydraulic actuator within each leg works in series with a pneumatic spring. Together,
they change the length of the leg and make the leg compliant along its long axis. The body
is an aluminum frame, on which are mounted hip actuators and computer interface
electronics. The arrangement of body, legs, hips, and actuators provides a means to
control the position of the feet with respect to the body, to generate an axial thrust
with each leg, and to provide hip torques during running.
The algorithms used to control machines that hop on one leg can be extended to control
a planar biped, which runs on two legs. The basic approach is for the control system to
designate an active leg and an idle leg. Because there is just one active leg at a time,
the one-leg algorithms can be used to control the biped's behavior. These algorithms focus
on controlling hopping height, forward running speed, and body posture. The idle leg is
kept short while it is made ready for the next step. Using this approach, the planar biped
runs with an alternating gait or a hopping gait, and can change gaits while running. We
have used the planar biped to study locomotion on rough terrain, running at high speed,
and gymnastic maneuvers. The control program that produces a flip uses open-loop control
patterns in conjunction with the algorithms for normal running.
Images
Video
Publications
- Hodgins, J. 1988. Legged robots on rough terrain: experiments in adjusting step length.
In Proceedings of the IEEE International Conference on Robotics and Automation
Philadelphia, March 1988.
- Hodgins, J. 1989. Legged Robots on Rough Terrain: Experiments in Adjusting Step
Length. Ph.D Thesis, Computer Science, Carnegie Mellon University, Pittsburgh,
Pennsylvania.
- Hodgins, J. 1991, Biped gait transitions. In Proceedings of the IEEE International
Conference on Robotics and Automation Sacramento.
- Hodgins, J., Raibert, M. H. 1987. Planar Biped Goes Head Over Heels. In Proceedings
ASME Winter Annual Meeting Boston, December, 1987.
- Hodgins, J., Raibert, M. H. 1987. Biped Gymnastics, In Fourth International Symposium
of Robotics Research, B. Bolles, B. Roth (eds.), (MIT Press, Cambridge).
- Hodgins, J., Raibert, M. H. 1990. Biped gymnastics, International J. Robotics
Research, 9:(2) 115--132.
- Hodgins, J., Raibert, M. H., 1991. Adjusting step length for rough terrain locomotion, IEEE
J. Robotics and Automation.
- Hodgins, J., Koechling, J., Raibert, M. H. 1986. Running experiments with a planar
biped. Third International Symposium on Robotics Research, G. Giralt, M. Ghallab
(eds.). (MIT Press, Cambridge).
- Hodgins, J., Koechling, J., Raibert, M. H. 1991. Running Experiments with a Planar
Biped, CMU Computer Science 25th Anniversary\/, Addison-Wesley: New York.
- Koechling, J. The Limits of Running Speed: Experiments with a Legged Robot. Ph.D
Thesis, Department of Mechanical Engineering, Carnegie Mellon University, Pittsburgh,
Pennsylvania, 1989.
- Koechling, J. and Raibert, M. 1988. How fast can a legged robot run? In: Symposium in
Robotics, DSC-Vol{.\thinspace11, K. Youcef-Toumi, H. Kazerooni (eds.). (American
Society of Mechanical Engineers, New York).
- Thompson, C. M., Raibert, M. H., 1989. Passive dynamic running, In International
Symposium of Experimental Robotics, Hayward, V., Khatib, O. (eds.), (Springer-Verlag,
New York).
© Copyright MIT Leg
Laboratory. All Rights Reserved.
{kind=link}