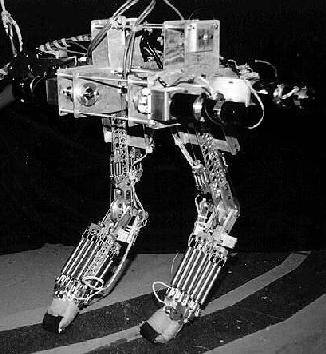
Spring Turkey is a planar bipedal walking robot. This robot was developed as an experimental platform for implementing
Spring Turkey was designed and built by Peter Dilworth and Jerry Pratt in 1994. It has an actuated hip and knee on each leg. An unactuated boom constrains Spring Turkey's roll, yaw, and lateral motion thereby reducing it to a two dimensional robot. All of Spring Turkey's motors are located in its upper body, with power being transmitted to the joints via cable drives. Series Elastic Actuation is employed at each degree of freedom, allowing for accurate application of torques and a high degree of shock tolerance. The maximum torque that can be applied to the hips is approximately 12 Nm while approximately 18 Nm can be applied to the knees. The force control bandwidth we achieve is approximately 20 Hz. Spring Turkey weighs in at approximately 22 lbs (10 kg) and stands 2 ft (60 cm) tall.
Rotary potentiometers at the hips, knees, and boom measure joint angles and body pitch. Linear springs are used at the hips and knees to implement Series Elastic Actuation. Rotary potentiometers measure hip spring stretch while linear potentiometers measure knee spring stretch. In all there are four actuators and nine sensors on Spring Turkey.
We have implemented two simple walking algorithms. The first we dub Stupid Walking. With this algorithm, we have successfully compelled the robot to reliably take three or four consecutive steps, and occassionally take up to eight consecutive steps, as shown in the MPEG video below.
The second algorithm, called Turkey Walking, includes speed control. With this algorithm, the robot took consecutive laps, as shown in the MPEG video below.
Spring Turkey was retired 1/96 due to mechanical and other difficulties. A new robot, Spring Flamingo, was started at that time. Spring Flamingo is intended to be more mechanically reliable, and also be equipped with feet and active ankles.
© Copyright MIT Leg Laboratory. All Rights Reserved.