Doll (1993-1994)
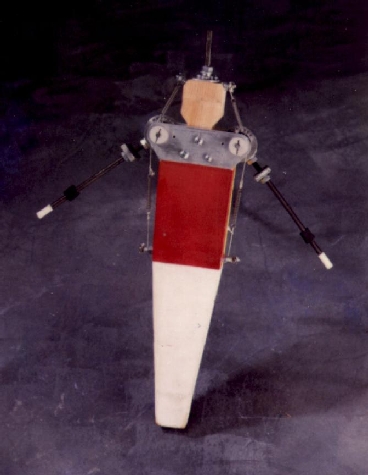
The Doll is ...
Images
Video
Publications
- Playter, R. R. Passive
Dynamics in the Control of Gymnastic Maneuvers , Ph.D Thesis, Department of
Aeronautical and Astronautical Engineering, Massachusetts Institute of Technology,
Cambridge, Massachusetts, 1994. [Zipped Postscript, 5.1Mb]
- Playter, R. R., Raibert, M. H. 1994. Passively Stable Layout Somersaults. Canadian
Society For Biomechanics, Proceedings of Eight Biennial Conference and Symposium the\/,
Calgary, Alberta, Canada.
- Playter, R. R., Raibert, M. H., 1994. Passively Stable Layout Somersaults. Eighth
Yale Workshop on Adaptive and Learning Systems, June 13-15, 1994, New Haven, CT. USA
66-71.
© Copyright MIT Leg
Laboratory. All Rights Reserved.
{kind=link}