Model Reduction for Human and
Animal Locomotion
MIT2001-08
Progress Report: January 1,
2002—June 30, 2002
Jovan Popovic
Project
Overview
 Complexity of
existing mathematical models inhibits the analysis and the automatic animation
of human and animal motion. Current techniques rely on numerical simulations of
highly nonlinear differential equations in high-dimensional spaces. A motion
with such large-scale dynamics is difficult to control because of the sheer
size of its control space. We are developing a method for constructing simpler
mathematical models of lower dimensionality. The simplification consists of two
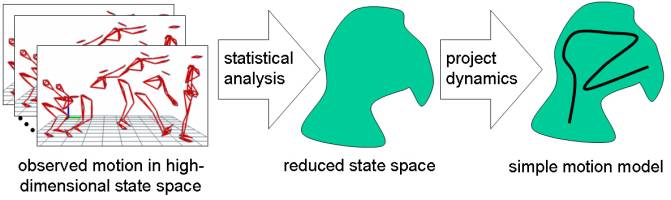
steps: state-space reduction and model projection. The state-space reduction relies on statistical analysis of
real-world observations to reduce the dimensionality of the original state
space. The model projection
constructs a new mathematical model on the reduced subspace by projecting the
original equations of motion. The
simplification will enable automated animation of complex mechanical systems.
Complexity of
existing mathematical models inhibits the analysis and the automatic animation
of human and animal motion. Current techniques rely on numerical simulations of
highly nonlinear differential equations in high-dimensional spaces. A motion
with such large-scale dynamics is difficult to control because of the sheer
size of its control space. We are developing a method for constructing simpler
mathematical models of lower dimensionality. The simplification consists of two
steps: state-space reduction and model projection. The state-space reduction relies on statistical analysis of
real-world observations to reduce the dimensionality of the original state
space. The model projection
constructs a new mathematical model on the reduced subspace by projecting the
original equations of motion. The
simplification will enable automated animation of complex mechanical systems.
Progress
Through June 2002
The
Lagrange formulation is a three-step recipe for deriving motion models of
mechanical systems. First, select
a state space that describes configurations of a mechanical system. For example, the state space for a
skeleton would describe joint angles and the pose of the root joint. Second, write the Lagrangian function
on the state space. For example,
the Lagrangian for skeletal motion is the difference between the kinetic and
the potential energy of the skeleton.
Third, apply the Euler-Lagrange equations to generate the equations of
motion.
The
Lagrangian recipe generates appropriate equations for all differentiable state
spaces. For skeletal motion, this
generality implies that the same recipe produces low-dimensional motion models
for Lagrangians on simple skeletons and high-dimensional models for Lagrangians
on intricate skeletons.
Eliminating the joints simplifies the mathematical model of motion.
Although skeleton simplification is a standard preprocessing practice in
computer animation, it has two significant drawbacks. First, it ties simplification to joint-angle representation
and cannot reveal structure in alternative representations such as saggital elevation
angles or marker data recorded by a motion-capture system. Second, it provides no mechanism for
identifying dimension of the reduced state space.
We
use principal component analysis to reduce the dimensionality of a
configuration space. Our
motion-capture system provides the data needed for this analysis. A mathematical model defines the
equations of motion that describe the evolution of a skeleton in the reduced
space. We derive these equations by the standard Lagrange recipe, after
projecting the Lagrangian of the skeleton to the reduced space.
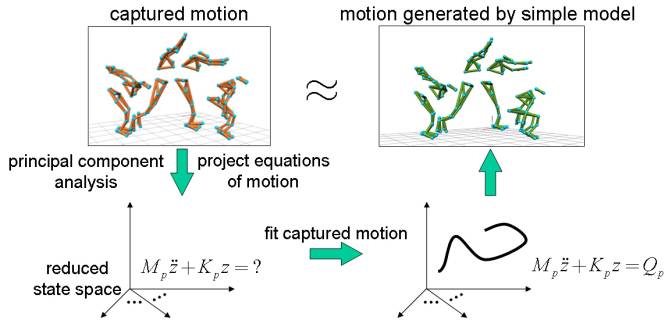 Figure 1. A fitting procedure estimates
the parameters of the simple model (the generalized forces
Figure 1. A fitting procedure estimates
the parameters of the simple model (the generalized forces![]() ) to approximate the original motion.
) to approximate the original motion.
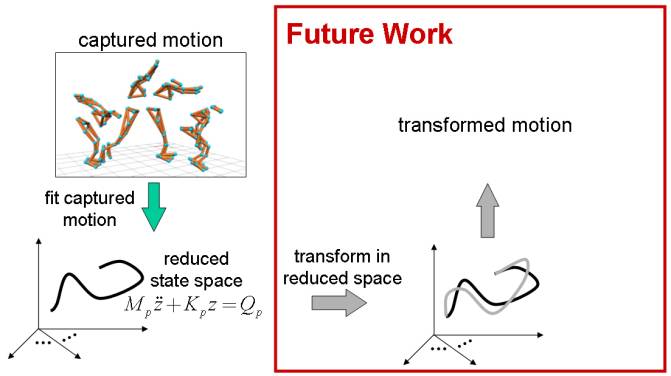
A
simple mathematical model enables physically based transformation of recorded
motion. A motion transformation technique should produce a new motion that
satisfies novel constraints while retaining the detail and style of the
recorded motion. For example, if
we record a human broad jump, we might want to elongate or shorten the jump without
loosing the style of the original motion. This problem can be formulated as a
constrained optimization, which minimizes the difference between the original
and transformed motion subject to Newtonian constraints, which make the
resulting motion physical, and animation constraints, which describe the
requirements for new motion. While
large-scale dynamics of skeletal motion prevents robust convergence of the
optimization in the high-dimensional state space, a simple mathematical model
enables convergence by approximating Newtonian constraints.
We
completed the first step of a new motion transformation technique. In this
step, the fitting procedure estimates the parameters of the simple model (the
generalized forces in the reduced space) to approximate the original motion, as
shown in Figure 1. The new motion exhibits small stretching and sliding
artifacts, which result from reducing the original 123-dimensional state space
to the new 10-dimensional space, but otherwise the approximated motion looks natural
and close to the original, as shown in Figure 2.
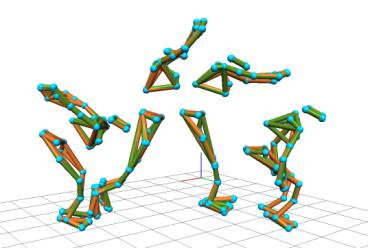
Figure 2 The difference between original motion in orange
and the estimated motion in green.
Research
Plan for the Next Six Months
In
the reduced state space, a constrained optimization can transform a motion
described by the simple mathematical model. We will implement these steps in
the next six months to complete our motion transformation technique.