Model Reduction for Human and
Animal Locomotion
MIT2001-08
Progress Report: July 1,
2002ãDecember 31, 2002
Jovan Popovic
Project
Overview
 Complexity of
existing mathematical models inhibits the analysis and the automatic animation
of human and animal motion. Current techniques rely on numerical simulations of
highly nonlinear differential equations in high-dimensional spaces. A motion
with such large-scale dynamics is difficult to control because of the sheer
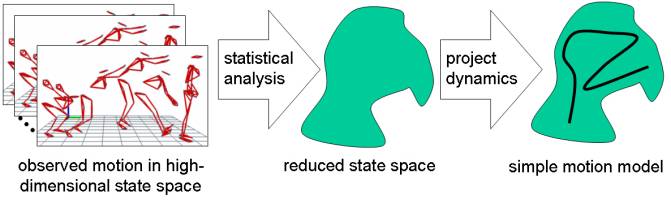
size of its control space. We are developing a method for constructing simpler
mathematical models of lower dimensionality. The simplification consists of two
steps: state-space reduction and model projection. The state-space reduction relies on statistical analysis of
real-world observations to reduce the dimensionality of the original state
space. The model projection
constructs a new mathematical model on the reduced subspace by projecting the
original equations of motion. The
simplification will enable automated animation of complex mechanical systems.
Complexity of
existing mathematical models inhibits the analysis and the automatic animation
of human and animal motion. Current techniques rely on numerical simulations of
highly nonlinear differential equations in high-dimensional spaces. A motion
with such large-scale dynamics is difficult to control because of the sheer
size of its control space. We are developing a method for constructing simpler
mathematical models of lower dimensionality. The simplification consists of two
steps: state-space reduction and model projection. The state-space reduction relies on statistical analysis of
real-world observations to reduce the dimensionality of the original state
space. The model projection
constructs a new mathematical model on the reduced subspace by projecting the
original equations of motion. The
simplification will enable automated animation of complex mechanical systems.
Progress
Through December 2002
Transformation
of recorded human motion is an important application of our model reduction
technique. The transformation techniques aim to produce a motion that complies
with novel constraints while retaining the detail and style of the originally
recorded motion. For example, if
we record a human broad jump, we might want to elongate or shorten the jump
without loosing the style of the original motion. This transformation problem
can be stated as a constrained optimization with an objective function that
minimizes the difference between recorded and transformed motion and
constraints that make the resulting motion physical and that describe the
requirements for new motion. Because large-scale dynamics of skeletal motion
prevent robust convergence of this optimization in the high-dimensional state
space, simple mathematical models produced by our model reduction approach are
necessary.
In
the last six months, we completed an implementation of the motion transformation
technique that uses model reduction to approximate the dynamics of human
motion. Our technique consists of three steps, which fit, transform and project
recorded motion. The first step approximates recorded motion with a reduced
model of human dynamics. We derive a separate reduced model for each human
activity such as a walk, a broad jump, or a run. The derivation is a two-step
process, which uses principal component analysis of motions within each class
to reveal a low dimensional state space and Euler-Lagrange equations to evolve
the dynamics of human motion on the reduced state space. The model describes
the motion of the skeleton in response to the action of the internal skeleton
forces. The fitting step infers
the parameters that describe these forces with an optimization that maximizes
the fit to recorded motion. This solution serves as a good initial guess for
the transformation step, which adapts the recorded motion to comply with new
animation requirements: for example, to extend or shorten a broad jump.
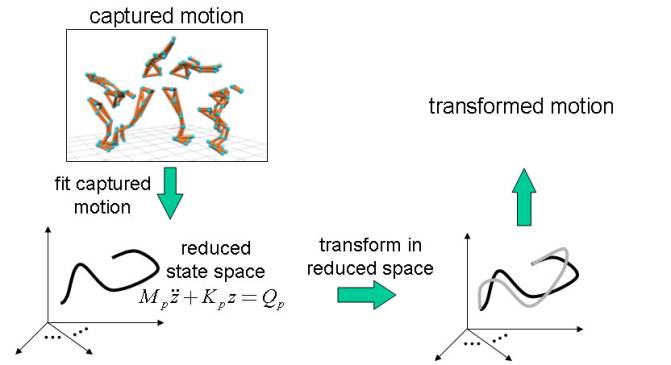
Figure 1. The motion transformation
technique approximates recorded motion with a reduced model, transforms the
motion in the reduced state space, and projects the transformed motion into the
original high-dimensional state space.
The
transformation step solves another optimization step to generate desired
motion. Because the reduced model and the reduced state space encapsulate
appropriate dynamics, the resulting motion remains physically consistent even
as it complies with requested modifications. The last step completes the
transformation by projecting the motion into its original high-dimensional
space.
Research
Plan for the Next Six Months
Although
our current implementation generates reasonable motions for minor modifications
of recorded motion, it does not generate visually pleasing results in most
scenarios. We have several explanations for these problems:
∑
The current
dynamics equations describe the motion of a human skeleton with a system of
lumped-mass particles. This idealized approach may be an inadequate
approximation of the true skeleton dynamics.
∑
The reduced model
summarizes the action of human muscles with simple damped-spring forces.
Although the stiffness and damping coefficients of these forces have intuitive
meaning in the joint angle state space, their meaning is unclear in the reduced
state space inferred by the principal component analysis.
In
the next six months, we will determine the true causes of observed problems and
devise appropriate solutions. The following table summarizes our work plan:
|
Time period |
Task |
|
January-February |
Use linked rigid-body dynamics to transform low-dimensional
motions without the reduced model of dynamics. |
|
March |
Compare the transformation with lumped-mass dynamics and the
transformation with linked rigid-body dynamics. |
|
April |
Revise lumped-mass implementation and combine with model reduction |
|
May |
Revise linked rigid-body implementation and combine with model
reduction |
|
June |
Evaluate lumped-mass and linked rigid-body implementations on
motions of entire human skeletons. |