Hardware
Click on a part in the picture for more information about it, or click here for a complete parts list.
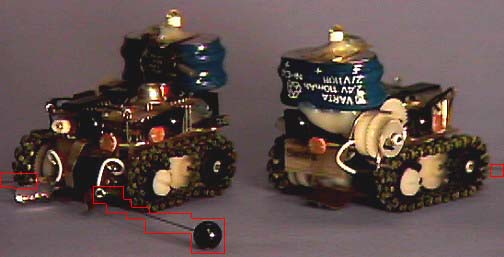
Bump Sensors
Each robot has two bump sensors. When the robots run in to something solid, the bump sensor wires bend and make contact with a wire loop. This signals the microprocessor that the robot has bumped into an object. The little black balls at the end of the bump sensor wires help to keep the robots from getting tangles up in each other when they are bunched up together.
 Return to main page.
Return to main page.