|
Retired Robots
|
|
|
|
 |
The Ants: A Community of Microrobots
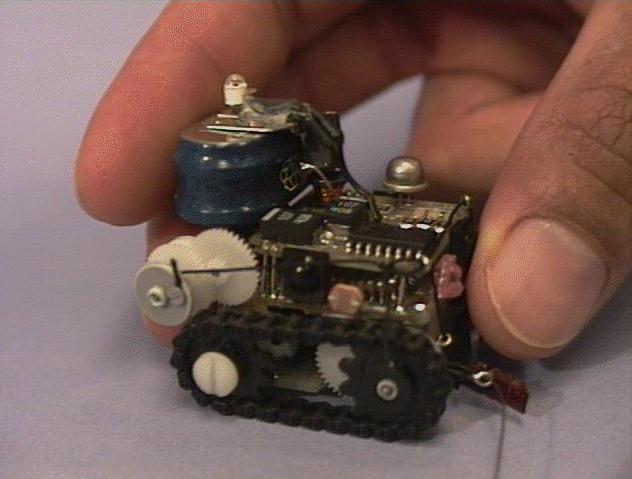
The Ants are a community of cubic-inch microrobots at the MIT Artificial Intelligence Lab. There are two main goals for this project. The first is to push the limits of microrobotics by integrating many sensors and actuators into a small package. The second is to form a structured robotic community from the interactions of many simple individuals. The inspiration behind this idea comes from nature -- the ant colony.
In order to accomplish these goals, the robots have been equipped with sensors and actuators designed with their natural counterparts in mind. Each robot has 17 sensors including; four light sensors, four IR (infrared) receivers, bump sensors, food sensors, and a tilt sensor. They communicate with each other using two IR emitters, one mounted on the front of the robot and one mounted on the top.
There are several levels of social behavior before reaching the goal of the ant colony. Right now, the robots can play Follow the Leader, Tag and Manhunt. Manhunt is similar to tag except there are two teams. The final game before the full-fledged Ant Farm is Capture the Flag.
There are many application for robotic communities, including explosive ordnance disposal, and Mars exploration. All the pictures on these pages are clickable to get a full-screen image.
Hardware:
Software
More Information
Related Research at the MIT AI Lab:
Related Research Elsewhere:
The Interaction Lab at Brandeis.
Related Web Sites:
James McLurkin