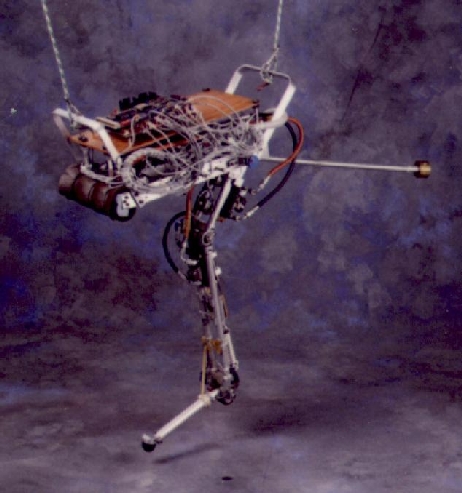
The Uniroo robot is kinematically similar to a real kangaroo of mass 6.6 kg. The Uniroo consists of a body, a three-joint (hip, knee, ankle) articulated leg, and a single degree-of-freedom tail. The body is a bolted framework of aluminum struts, and the leg is composed of welded aluminum tubes. Hydraulic actuators control each joint. A steel coil spring at the ankle stores elastic energy during stance.
The Uniroo differ from the previous robots in four important respects. The Uniroo is not symmetric, the leg is articulated instead of telescoping, the hip is offset from the center of mass, and the leg is relatively heavy (one-third the mass of the body). Because of the asymmetry, the ground forces during stance affects the body pitch. A massive leg also affects the body pitch as the leg is swept forward during flight. Finally, the kinematic redundancy of the leg must be addressed.
Work with the Uniroo showed that it is possible to control the balance of legged robots that have a non-symmetrical mechanical structure. Regulation of angular momentum allowed the Uniroo robot to hop in a range of forward velocities from 0 to 1.8m/s for at least a minute. Although nothing proves that a steadily null angular momentum is part of an optimal hopping strategy, we observed that a small angular momentum is a characteristic of ``smooth'' hopping and underlies a very natural motion.