[Description][Video]
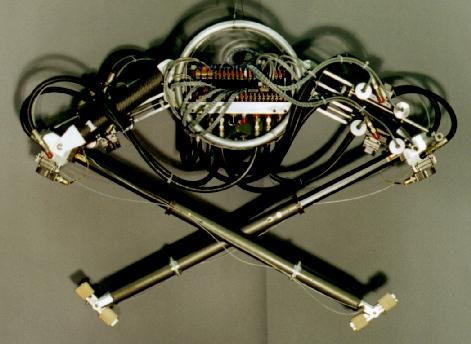
The planar quadruped is a hydraulically-powered, experimental platform for studying the role of the spine in fast running. The planar quadruped robot was built to study the role of a limber-back in quadruped running. The kinematics of the planar quadruped design allows a large workspace in a slim, antisymmetric package. The workspace reaches from the extended pose of first flight to the crossed pose of second flight. A planarizing boom constrains motion of the quadruped to a plane, allowing horizontal and vertical translation of the robot and rotation about the pitch axis.
We are interested in exploring the role of the spine in fast running, especially the hypothesis that the spine may play an active role in power transfer between the fore and rear legs. Other areas of exploration include
We desire to develop a controller for the planar quadruped robot based on trans-spinal power transfer considerations. It is hoped that such a controller might result in the emergence of "cat-like" bounding behavior.
© Copyright MIT Leg Laboratory. All Rights Reserved.