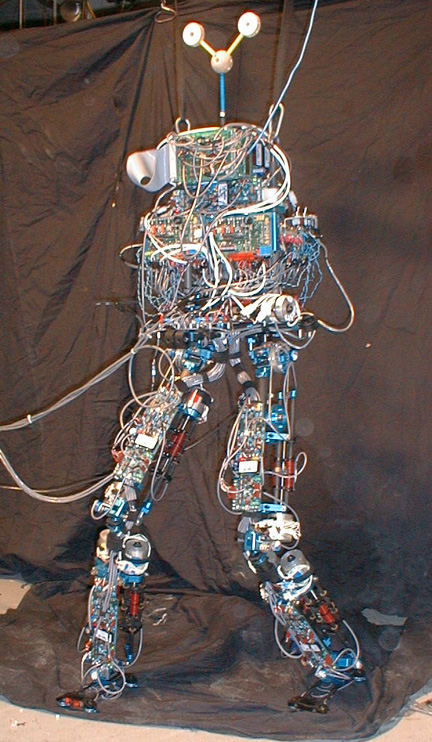
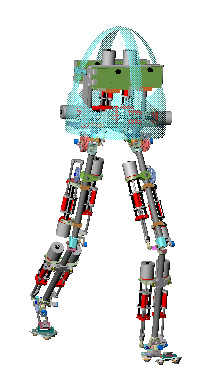
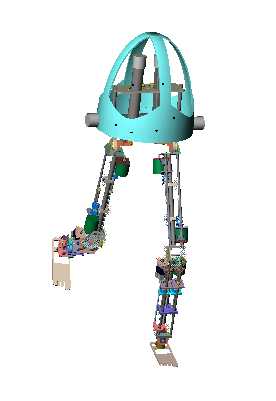
M2 is a 3D bipedal walking robot which is currently being developed
in the MIT Leg Laboratory. The robot has 12 active degrees of freedom:
3 in each hip, 1 in each knee, and 2 in each ankle. It will be used
to investigate
| July 23, 1998: Project schedule complete. |
 |
-
August 14, 1998: M2 configuration decided.
|
-
August 28, 1998: Planar simulation with M2 weight parameters walking.
|
-
September 4, 1998: Preliminary CAD assembly of M2 done.
|
  |
-
September 8, 1998: M2 Weight budget determined.
|
-
September 8, 1998: First progress meeting.
|
-
October 3, 1998: Full scale mockup of M2 built.
|
-
December 11, 1998: Three dimensional simulation of M2 walking.
|
[MPEG] [Cinepak
Quicktime] [Sorenson Quicktime] |
-
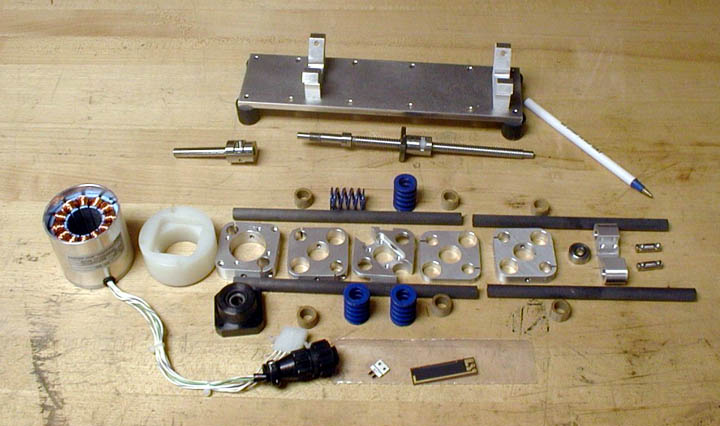
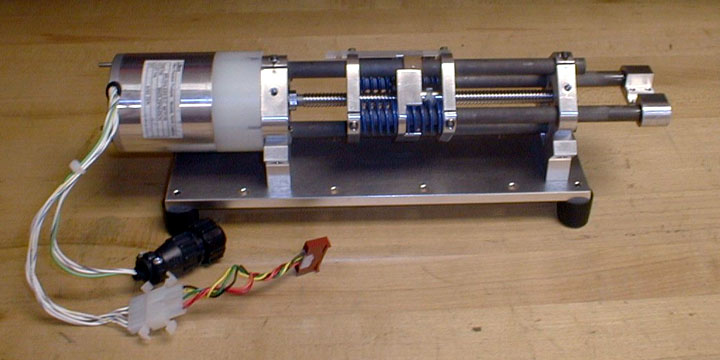
December 30, 1998: Frameless actuator prototype (FRAP) built.
|
  |
-
January 14, 1999: Frameless actuator prototype tested.
|

Video of testing with 300 pound load, moving at top speeds of 9 inches
per second: [Cinepak Quicktime
(3.5MB)][Sorenson Quicktime
(3.1MB)]
|
-
January 15, 1999: Mechanical power requirements determined.
|
-
February 15, 1999: Foot designed.
|
-
April 16, 1999: Final actuator designed.
|
-
May 19, 1999: 12 week lead parts ordered.
|
-
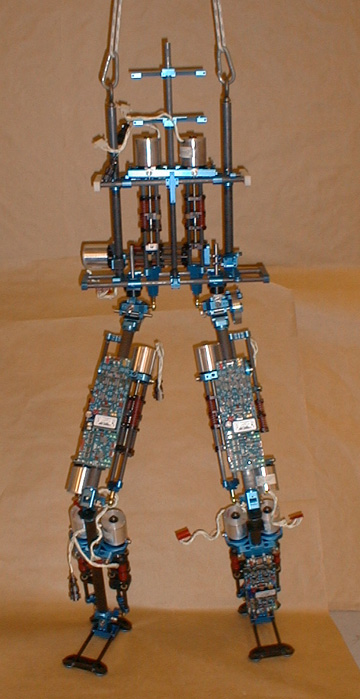
June 10, 1999: M2 Leg Designed.
|
-
June 30, 1999: M2 Vestibular System Designed.
|
-
July 30, 1999: Electronics Designed.
|
-
October 25, 1999: Full CAD assembly model completed.
|
-
November 30, 1999: Machined Parts Sent Out.
|
-
November 30, 1999: Electronic Boards and Parts Ordered.
|
-
December 16, 1999: Begin M2 Assembly.
|
 |
-
January 6, 2000: Force Control Boards Populated
|
-
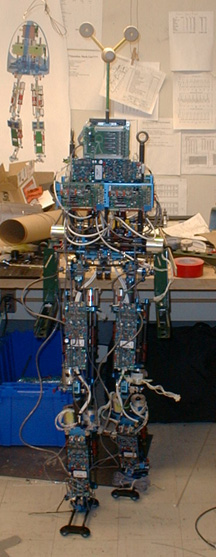
March 2000: Mechanical Assembly Complete.
|
|
-
April, 2000: Complete System Integration.
|
|
-
April 15, 2000: M2 Standing
|
|
-
July, 2000: M2 takes a step
|
|
-
August, 2000: M2 steps in place
|
|
-
September, 2000: M2 runs on batteries and radio-ethernet offsite just outside
Washington, DC.
|
|