Mandibles
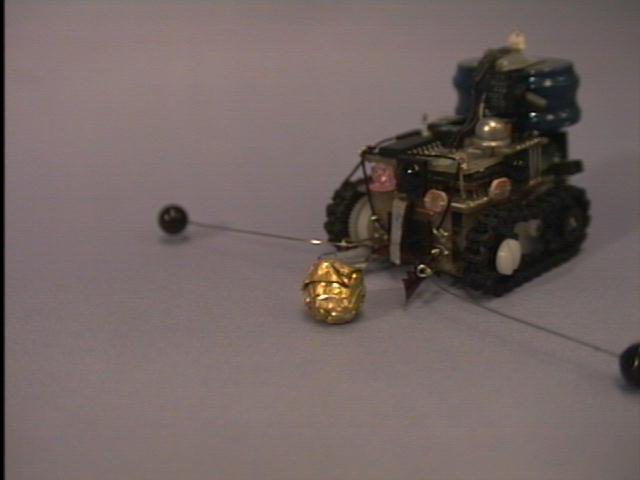
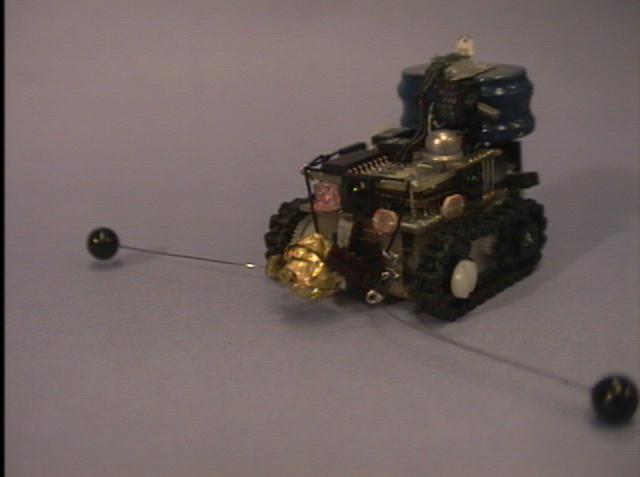
Each robot has a pair of mandibles on the front. These work like grippers and allow the Ants to pick up pea-sized objects in their environment. There is a motor in the back that turns a pully that pulls a string that goes around to the front of the robot that splits into two and pulls each of the jaws in and up. (Whew) It is this complex in order to get the mandibles to perform two actions, grab and then lift, while only using a single motor. However, they don't work very well, and are currently being redesigned.



This sequence of pictures shows one of the Ants picking up some food. Want a better view? Here are some MPEGs of the same thing.
An Ant picking up food. (287K MPEG)
Cleo (a prototype Ant) following light and picking up food. (329K MPEG)
Food Sensors
There are five food sensors, two built into the bump sensors, two mounted on the inside surface of both mandible jaws, and one in between the jaws. In the picture, you can see the two white wires that connect the jaw food sensors to the computer. The food sensors are really just voltage sensors. All the food is crumpled pieces of brass foil, resting on the conductive surface of the ant farm. The robots are also in contact with this surface, and can measure voltages using it as a ground refrence. So, anything conductive will be shorted to the surface, which is shorted to the robots ground reference, and will "taste" like zero volts. This lets the robots find their food.
In order to really be food, an object has to be more than just conductive:
 Return to main page.
Return to main page.