
Human-Robot Dynamic Social Interaction
NTT9904-01
Start date: 07/99
MIT AI Lab
Katsunori Shimohara
NTT
| Research Projects | |
Human-Robot Dynamic Social InteractionNTT9904-01 Start date: 07/99 |
Rodney Brooks MIT AI Lab Katsunori Shimohara NTT |
Project summary |
|
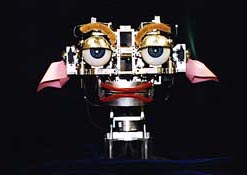
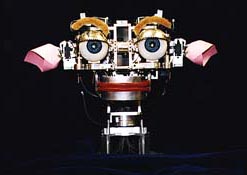
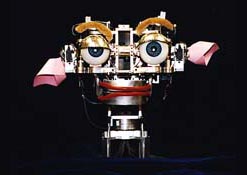
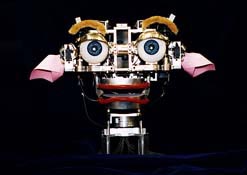
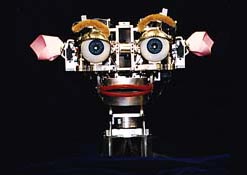
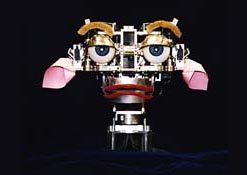
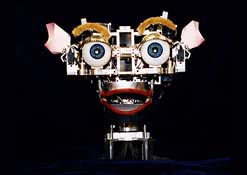
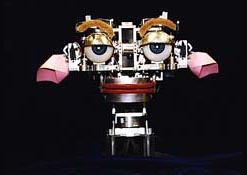
Humans naturally interact with robots which display human social cues---is there a stronger response to robots than to graphical images with the same behavior?
Project description |

|
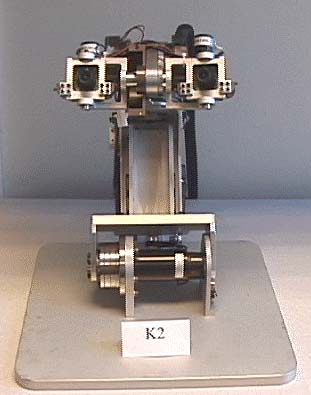
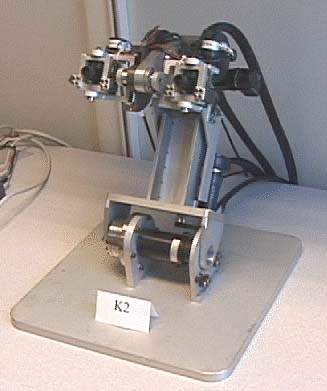
NTT researchers are interested in the question of whether a physical robot produces a more direct emotional coupling with human beings than does a computer generated graphical image of a similar robot. At MIT we are building a robot that has human-like facial expressions and shoulder and neck gestures, and that perceives human motion and facial expressions. This is coupled to an emotional system so that the person and the robot naturally follow normal human communication social dynamics. This robot will be installed at the NTT Communications Science Laboratories in Kyoto where the response of human subjects will be measured and compared to their response a graphical face interface. We have already developed a prototype robot, named Kismet, and pictured here which is capable of engaging a person in dynamic social interaction. We are currently building a much more capable robot for NTT. |
Demos, movies and other examples |
 |
 |
 |
 |
 |
 |
 |
 |
Quicktime (21039K bytes). There are three clips here of Kismet searching for some stimulus, following a stimulus and avoiding a stimulus.
Quicktime (26546K bytes). The same three behaviors are shown again, but this time in a social setting where emotional affect is generated.
 |
 |
 |
The principal investigators |
Presentations and posters |
Publications |
"A Context Dependent Attention System for a Social Robot", Cynthia Breazeal and Brian Scassellati, In Proceedings of the Sixteenth International Joint Conference on Artificial Intelligence (IJCAI-99). Stockholm, Sweden, pp. 1146--1151, 1999.
![]()
"How to Build Robots that Make Friends and Influence People", Cynthia Breazeal and Brian Scassellati, In Proceedings of the 1999 IEEE/RSJ International Conference on Inteligent Robots and Systems (IROS-99). Kyongju Korea, pp. 858--863, 1999.
![]()
"Toward Teaching a Robot "Infant" Using Emotive Communication Acts", Cynthia Breazeal and Juan Velasquez, In Proceedings of the 1998 Simulated Adaptive Behavior Workshop on Socially Situated Intelligence (SAB-98). Zurich, Switzerland, pp. 25--40, 1998.
![]()
"Robot in Society: Friend or Appliance?", Cynthia Breazeal, In Proceedings of the 1999 Autonomous Agents Workshop on Emotion-Based Agent Architectures. Seattle, WA, pp. 18--26, 1999.
![]()
"Schmoozing With Robots: Exploring the Boundary of the Original Wireless Network", Cynthia Breazeal and Anne Foerst, In Proceedings of the 3rd International Cognitive Technology Conference (CT-99). San Francisco, CA, pp. 375--390, 1999.
![]()
"Infant-like Social Interactions Between a Robot and a Human Caretaker", Cynthia Breazeal and Brian Scassellatti, to appear Adaptive Behavior 8(1), 2000.
![]()
Proposals and progress reports |
Proposals:
NTT Bi-Annual Progress Report, July to December 1999:
NTT Bi-Annual Progress Report, January to June 2000:
NTT Bi-Annual Progress Report, July to December 2000:
NTT Bi-Annual Progress Report, January to June 2001:
NTT Bi-Annual Progress Report, July to December 2001:
NTT Bi-Annual Progress Report, January to June 2002:
NTT Bi-Annual Progress Report, Julyy to December 2002:
For more information |